Gelegentlich erreichen mich Anfragen zu Anwendungen mit Schrittmotoren, bei denen die Anwender mit Begriffen um sich werfen, die sie offenbar nicht verstanden haben. Ein Klassiker ist der „Nema Schrittmotor“. Der eine scheint das für einen Herstellernamen zu halten, der nächste für eine Typenbezeichnung. Tatsächlich liegt der Fall etwas anders…
NEMA steht für “National Electrical Manufacturers Association” und ist eine amerikanische Normungsorganisation, ähnlich dem deutschen DIN Institut oder der ISO (International Standard Organisation). Für Schrittmotoren ist die NEMA-Norm ICS 16-2001 „Motion/Position Control Motors, Controls and Feedback Devices“ der relevante Standard. Genauso wie bei anderen Normungsinstituten sind die Normen der NEMA nicht frei zugänglich, sondern müssen käuflich erworben werden. Je nach Umfang der Norm fallen einige Hundert U$ dafür an. Daher möchte ich versuchen, nachfolgend einen Überblick über die verschiedenen Baugrößen bei Schrittmotoren zu geben.
Da die NEMA Normen aus dem amerikanischen Raum stammen, basieren Sie auf Maßangaben in Zoll (inch). Die verschiedenen Motorbaugrößen sind dementsprechend nach ihrem äußeren Kantenmaß (Flanschmaß) in verschiedene Größen unterteilt. Das Flanschmaß in 1/10“ ist dabei jeweils der Name der Baugröße, wobei sowohl die Zollangaben als auch bei der Umrechnung in Millimeter Rundungsfehler auftreten können. Nema 17 bedeutet also 1,7“, entsprechend 43,18mm. Tatsächliches Flanschmaß: 42,0mm. Auch die Wellendurchmesser basieren auf zölligen Maßen, z.B. die 6,35mm bei Nema 23 Motoren (6,35mm=1/4“). Zum Teil sind die Motoren für den europäischen Markt etwas angepasst. So definiert die ICS16-2001 die Gewindebohrungen für Motoren mit C-Flansch (Sacklöcher) mit amerikanischen Normgewinden (z.B. UNC 4-40 für Nema17). Die in der Norm definierten metrischen Flanschmaße finden bei Schrittmotoren offenbar keine Anwendung, weil das auf komplett eigene Baureihen für den metrischen Markt hinauslaufen würde. Anders ist es z.T. bei den Wellendurchmessern, Abschnitt 4.1.2.4 der Norm legt metrische Wellendurchmesser fest. Die 6,35mm Welle bei Nema23 Motoren zeigt aber, dass nicht alle Wellendurchmesser auf das metrische System angepasst wurden.
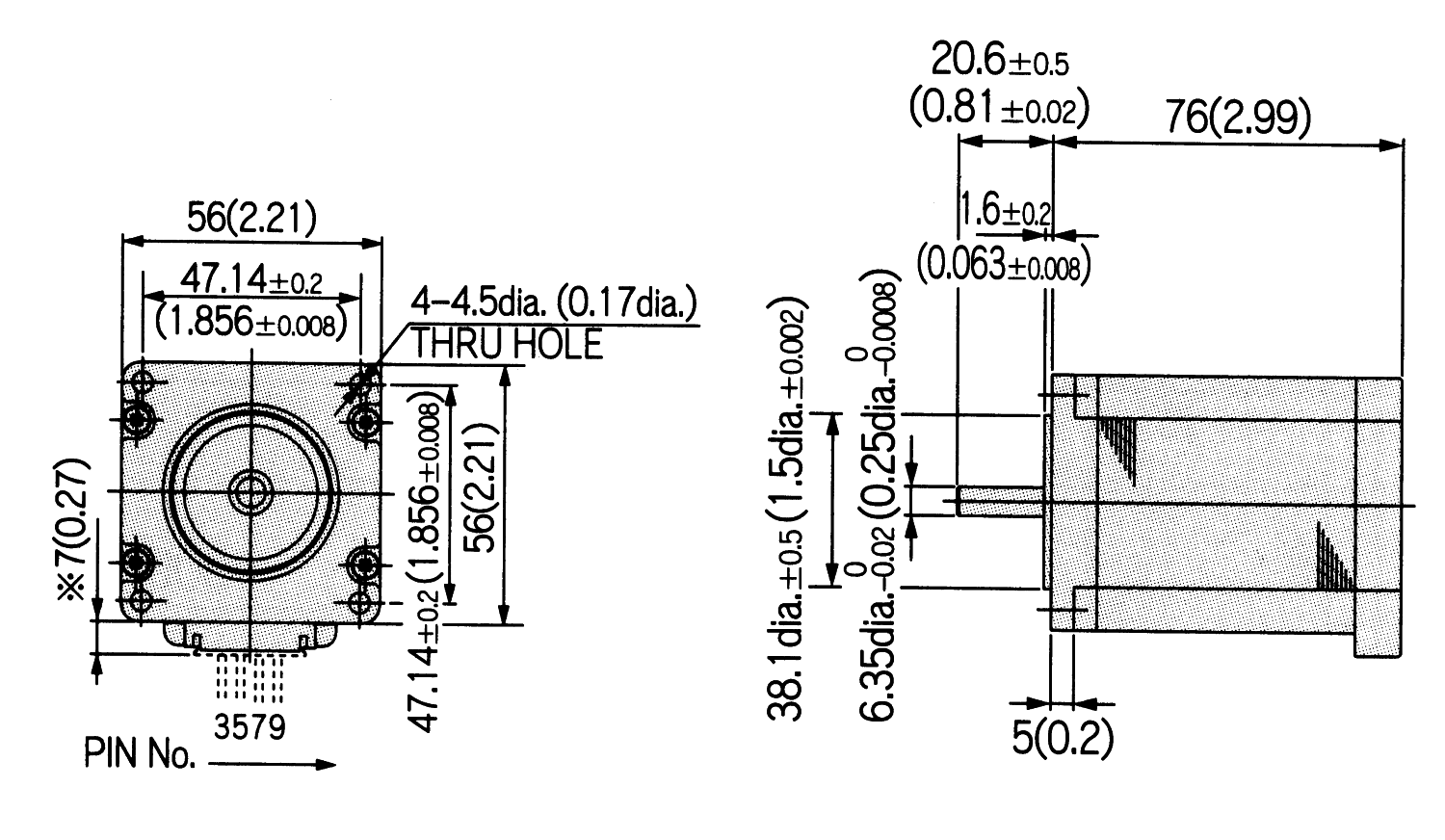
Maßzeichnung eines Motors mit Nema23-Flansch, Beispiel Nidec Servo KH56QM2-951
Die Normung der Baugrößen hat für die Anwender entscheidende Vorteile. Es gibt nur eine begrenzte Anzahl an verschiedenen Flanschmaßen und Wellendurchmessern. Motoren von verschiedenen Herstellern lassen sich (mit gewissen Einschränkungen) ohne konstruktive Änderungen gegeneinander austauschen. Das ermöglicht u.a. günstige Einkaufspreise. Im Detail gibt es allerdings schon Unterschiede, die beachtet werden müssen. So können die Länge der Welle und ihre Form (rund, abgeflacht, mit Passfedernut) sowie die Art des Anschlusses (Litzen, Stecker) unterschiedlich ausgeführt sein. Auch die elektrischen Daten sowie die Drehmoment-Kennlinien sind in der Regel nicht direkt vergleichbar.
Die Tabelle fasst die wichtigsten mechanischen Maße sowie typische Werte für am Markt erhältliche Baulängen, Haltemomente und Phasenströme zusammen. Die Daten sind den Katalogen namhafter, vorwiegend japanischer Hersteller entnommen und beziehen sich auf aktuell verfügbare Produkte. Ältere Motoren können z.T. deutlich geringere Haltemomente oder Motorströme aufweisen. Die Tabelle erhebt keinen Anspruch auf Vollständigkeit. Je nach Hersteller und Motorbaureihe kann es auch zu Abweichungen von den in der Norm angegebenen Maßen kommen. Bei Auswahl eines Motors sind die technischen Daten genau zu prüfen, um Probleme bei der Montage zu vermeiden. Das gilt auch, falls in einem bestehenden Produkt auf einen anderen Motortyp umgestellt werden soll.
| Baugröße | Flanschmaß | Lochabstand u. Bohrungen | typische Baulänge | Wellen-durch-messer | Drehmoment-Bereich | typischer Phasenstrom | Bemerkungen |
| (Nema08) | 20mm | 16,0mm 4*M2 |
28-48mm | 4,0mm | 0,018-0,036Nm | 0,5-0,8A | Zentrierdurchmesser auch 16,0mm Lochabstand auch 15,4mm |
| (Nema11) | 28mm | 23,0mm 4*M2,5 |
31-52mm | 5,0mm (0,1969″) | 0,03-0,14Nm | 0,4-1,4A | |
| (Nema14) | 35mm | 26,0mm 4*M3 |
20-52mm | 5,0mm (0,1969″) | 0,05-0,4Nm | 0,4-1,2A | Lochabstand auch 29,0mm |
| Nema17 | 42mm | 31,0mm 4*M3 |
33-59mm | 5,0mm (0,1969″) | 0,15-1,0Nm | 0,25-2,0A | |
| (Nema20) | 50mm | 41,0mm 4*4,5mm |
40-81mm | 6,35mm (1/4″) | 0,28-1,56 | 1,0-3,0A | |
| Nema23 | 56,4mm | 47,14mm 4*4,5mm | 41-112mm | 6,35mm (1/4″) | 0,4-3,4Nm | 0,7-4,0A | Wellendurchmesser z.T. auch 8,0mm Befestigungslöcher teilw. auch 5,0mm |
| (Nema24) | 60mm | 47,14mm 4*4,5mm | 44-90mm | 8,0mm (~0,3125″) | 0,75-3,2Nm | 1,0-6,0A | Lochabstand auch 50,0mm Zentrierdurchmesser auch 36,0mm |
| Nema34 | 86mm | 69,58mm 4*6,5mm | 63-150mm | 14,0mm | 2,5-14Nm | 3,0A-10,0A | Wellendurchmesser z.T. auch 9,525mm (0,375″) oder 12,0mm |
| Nema42 | 106/110mm | 88,88mm 4*8,5mm | 99-221mm | 19,0mm (~0,75″) | 12-30Nm | 5,5-10,0A | Wellendurchmesser auch 16,0mm (~0,625″) |
Die Tabelle mit weiteren Daten zum Download: Nema_Baugroessen
Die wichtigsten Baugrößen sind Nema 17, Nema 23 und Nema 34. Nema42 ist heute kaum noch gebräuchlich. Höhere Leistungsdichten erlauben oft den Einsatz eines kleineren Motors mit 86mm Flansch (=Nema34). Außerdem wird bei größeren Leistungen inzwischen eher auf Synchron-Servoantriebe gesetzt. Dafür sind in den letzten Jahren zunehmend kleinere Motoren auf den Markt gekommen. Das Angebot reicht heute bis herunter zu 20mm Flanschmaß („Nema08“), allerdings definiert die Norm keine Baugrößen kleiner Nema17. Nema 20 und Nema24 sind Zwischengrößen, die vermutlich von Nema23 abgeleitet wurden, auch diese Größen sind nicht im Standard festgelegt. Nema20 nutzt den gleichen Wellendurchmesser, während bei Nema24 aufgrund der höheren Drehmomente eine Welle mit 8mm Durchmesser zum Einsatz kommt. Auch bei den kleinen Baugrößen Nema14 und Nema11 gibt es Ähnlichkeiten zur größeren Nema17 Bauform. Bei diesen nicht genormten Größen ist besondere Aufmerksamkeit bei der Prüfung der Maßangaben gefordert.
Motoren mit 0,9° Vollschrittwinkel sind in den Baugrößen „Nema14“, Nema17 und Nema23 erhältlich. 3- und 5-phasige Motoren sind in den Baugrößen Nema23 und Nema34 verfügbar.